VIB2MOVE: In-Hand Object Reconfiguration via Fingertip Micro-Vibrations
Video Demonstrations
Object 1 Reconfiguration Demo
Object 2 Reconfiguration Demo
Object 3 Reconfiguration Demo
Object 4 Reconfiguration Demo
TL;DR: Vib2Move is a novel approach for in-hand object reconfiguration that uses fingertip micro-vibrations and gravity to precisely reposition planar objects with a parallel jaw gripper.
Abstract
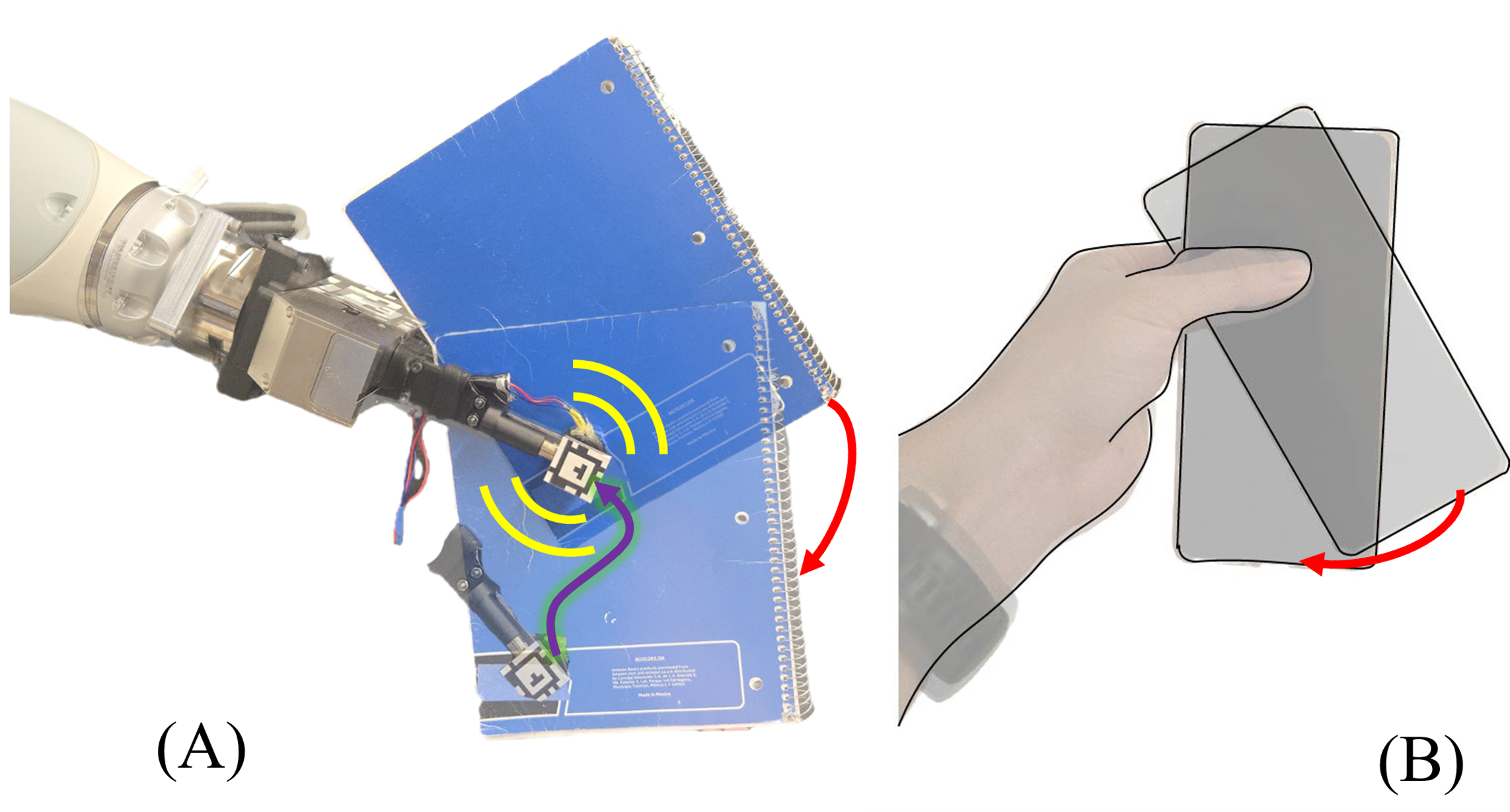
We introduce Vib2Move, a novel approach for in-hand object reconfiguration that uses fingertip micro-vibrations and gravity to precisely reposition planar objects. Our framework comprises three key innovations. First, we design a vibration-based actuator that dynamically modulates the effective finger-object friction coefficient, effectively emulating changes in gripping force. Second, we derive a sliding motion model for objects clamped in a parallel gripper with two symmetric, variable-friction contact patches. Third, we propose a motion planner that coordinates end-effector finger trajectories and fingertip vibrations to achieve the desired object pose. In real-world trials, Vib2Move consistently yields final positioning errors below 6 mm, demonstrating reliable, high-precision manipulation across a variety of planar objects.
Method
Our approach leverages fingertip micro-vibrations to dynamically modulate friction at the contact interface, enabling precise control over object motion. The method consists of three main components:
1. Vibration-Based Friction Modulation: We design a simple gripper attachment with embedded vibration motors that can rapidly alternate between stick and slip regimes at the contact interface, effectively providing high-frequency control over the "equivalent" grasping force.
2. Sliding Motion Model: We derive a model for planar objects grasped vertically in free space, where gravity is the sole external force. Our model depends only on the geometry of the finger contact area, making it robust to uncertainties in friction and object weight.
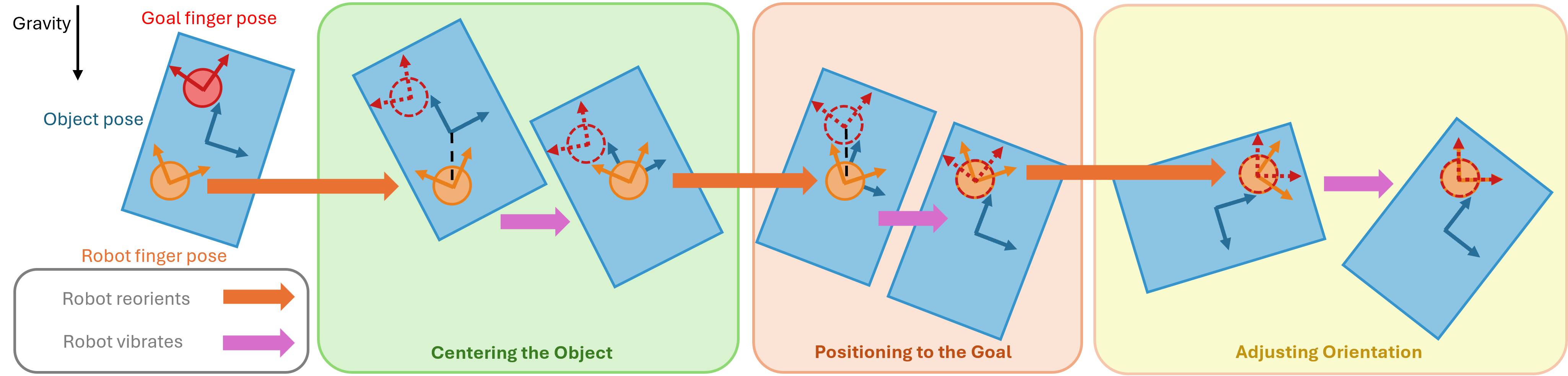
3. Motion Planning: We develop a three-stage planning algorithm that coordinates end-effector finger trajectories and fingertip vibrations to achieve the desired object pose, using closed-loop visual feedback for precise control.
Key Features
Simple Design
Low-profile vibration motors in each finger of a standard parallel jaw gripper, requiring only on-off vibration signals for rapid friction control.
Robust Control
Our approach is insensitive to exact friction coefficients and object mass, making it robust to variations in object properties and environmental conditions.
Free-Space Manipulation
Enables in-hand object reconfiguration in free space without requiring environmental fixtures or complex force sensors.
Results
We evaluated our method on a variety of planar objects with different shapes, surface materials, and mass distributions. Our experiments demonstrate that Vib2Move can reliably achieve precise in-hand object reconfiguration.
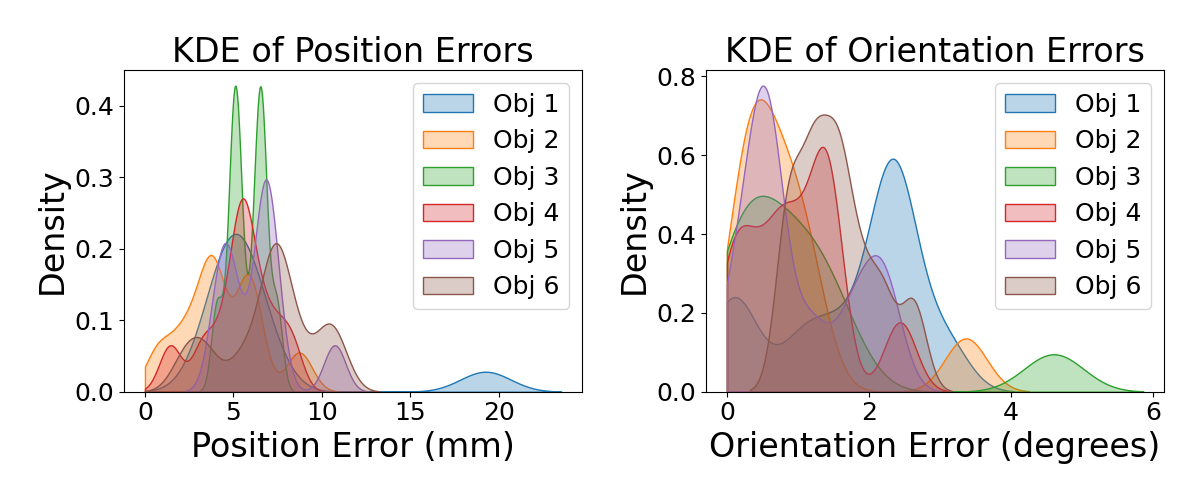
For all tested paths across six different objects, the root mean square error (RMSE) at the final pose is 5.91 mm in position and 1.21° in orientation. The observed position errors correspond to approximately 3%-5% of the object dimensions. Our system successfully reconfigured objects with varying properties, demonstrating robustness to friction anisotropy and material inconsistencies.
Team


Contact
For questions about the project, please contact Xili Yi or Nima Fazeli.